Georges Giralt, l’homme qui murmurait à l’oreille des robots

Georges Giralt a dessiné avec inspiration et conviction les contours de la robotique et de l’intelligence artificielle d’aujourd’hui. Du début des années 1950 aux années 2000, il s’est investi dans la création et le développement de thématiques de recherche innovantes à Toulouse et dans le monde. Portrait robot d’un chercheur avant-gardiste.
Par Clara Mauler, de l'équipe Exploreur. Une série d’interviews présentant les témoignages de Georges Giralt (décédé en 2013) et quelques-uns de ses collègues a été réalisée en 2009 par la mission « patrimoine scientifique et technique contemporain » du Conservatoire national des arts et métiers dans le cadre du projet « parcours de chercheurs ». Ces entretiens archivés nous offrent un regard personnel sur l’aventure scientifique qu’il a mené.
Bien avant WALL-E de Pixar, A.I. Intelligence artificielle de Spielberg et autre I-Robot, Georges Giralt a été un des premiers humains et chercheurs à entrevoir l’intelligence potentielle des robots. Figure majeure du paysage scientifique toulousain, chercheur roboticien et co-fondateur du laboratoire d’analyse et d’architecture des systèmes, le LAAS-CNRS, au côté du professeur Jean Lagasse, il a acquis une reconnaissance internationale pour ses intuitions et ses travaux en robotique et intelligence artificielle.
S’il a commencé ses études en électronique dans les années 1950, il oriente par la suite le champ de ses recherches et celles de son laboratoire vers ces domaines encore balbutiants en 1970. Petit composant semi-conducteur, robot mobile autonome, robot d’exploration planétaire… Il aura contribué à la naissance et au développement de sa discipline et d’un véritable « bestiaire » des robots intelligents.
Une rencontre déterminante avec le chercheur Jean Lagasse

En 1952, Georges Giralt a 22 ans et voit sa longue carrière démarrer grâce à la rencontre marquante et déterminante avec un jeune professeur dynamique, Jean Lagasse. Ils deviendront ensemble co-directeurs d’un laboratoire novateur spécialisé en systèmes informatiques, en robotique, automatique, micro et nano systèmes, le LAAS - acronyme qui signifie à sa création en 1968, laboratoire d’automatique et de ses applications spatiales.
Jean Lagasse repère tout d’abord l’étudiant prometteur et l’intègre comme technicien à l’école nationale supérieure d'électrotechnique et d'hydraulique de Toulouse. En parallèle, il y poursuit des études d’ingénieur, puis soutient son doctorat en électronique en 1958 à la faculté des sciences de l’Université de Toulouse. Dès 1956, il s’implique dans le développement d’un laboratoire de génie électrique, l’ancêtre du LAAS.
« J’ai eu l’extrême privilège de passer très vite la porte du CNRS pour venir aider le laboratoire qui se bâtissait sur l’automatique et l’électronique à Toulouse »
confie Georges Giralt.
Des débuts en électronique
Au début des années 1960, son arrivée au laboratoire coïncide avec une révolution dans le domaine de l’électronique : l’apparition du transistor. Ce composant conduit à la miniaturisation des circuits. Une course qui continue encore aujourd’hui.
Ses recherches s’axeront sur la construction de circuits et l’étude de leurs composants. Il encadre alors la thèse de Roland Prajoux qui sera, lui aussi, un des membres fondateurs du département de robotique au LAAS. Ils s’attellent ensemble à la création de systèmes électroniques complexes, comme le générateur du centre de recherche nucléaire européen de Genève (Cern). « Auparavant nous nous intéressions aux petits signaux, quelques volts, quelques nanoampères… Là le système faisait un mégawatt et 16000 ampères. Il fallait arriver à une puissance finale de l’appareil qui n’avait rien à voir avec tout ce qu’on avait pu faire», se souvient Roland Prajoux. « On a eu le culot de prendre la solution de composants semi-conducteurs. La folie était qu’ils étaient extrêmement fragiles », complète Georges Giralt.
Le LAAS, un laboratoire de recherche en constante évolution
Autre révolution, en mai 1968, la course à l’espace agite le monde scientifique et les recherches au laboratoire de génie électrique évoluent. Un nouveau laboratoire nait pour apporter les connaissances nécessaires au secteur toulousain en pleine expansion… le LAAS pour laboratoire d’automatique et de ses applications spatiales. « Au niveau national, il avait été décidé d’installer un centre d’étude spatial à Toulouse, le CNES. Le premier directeur a demandé s’il y avait de la bonne électronique. Et la réponse a été oui ! », sourit Georges Giralt.
« Mais rapidement on s’est rendu compte que nous n’aurions jamais assez de travail venant du CNES pour accompagner nos ambitions. C’était l’automatique des systèmes complexes qui nous intéressait, l’électronique avancée avec toutes ces bestioles qui devenaient de plus en plus intéressantes, qui tenaient à des températures plus importantes qu’avant… » Changement de titre au début des années 1970, derrière l’acronyme LAAS se cache désormais le laboratoire d’automatique et d’analyse des systèmes.
Aujourd’hui, on parle du laboratoire d’architecture et d’analyse des systèmes. Si le titre ne résiste pas forcément, l’esprit LAAS demeure avec son acronyme. Ses fondateurs ont impulsé une souplesse pour emprunter les passerelles entre ses diverses disciplines avec synergie et émulation.
Initiateur de l’intelligence artificielle appliquée aux robots
« Aujourd’hui, je peux vous dire que personne ne vous insulte parce que vous dites que le robot est intelligent. Mes collègues et amis avaient des difficultés à me pardonner que je puisse utiliser ce terme, même en mettant des guillemets »
se souvient le roboticien en plaisantant.
Une étape clé dans son parcours et sa réflexion le menant à combiner robotique et intelligence artificielle sera un séjour d’un an à l’Université de Californie à Berkeley. « Les États-Unis ont été un endroit de renouveau. J’ai vu apparaître l’enseignement de la logique formelle. Une surprise complète que j’ai saisie. » Cette discipline permettrait de transformer un raisonnement en objet mathématique susceptible d’être traité voire construit par un ordinateur. Par exemple, un texte court et dense présentant un raisonnement peut être transformé en formules et devenir accessible à une analyse automatique.
Le chercheur se rappelle sa posture de retour en France en 1974. « J’ai pu vite dire que la logique formelle c’était merveilleux et proposer de la mettre dans le « paquet » de la robotique. Nous avons donc pris la robotique comme des mécanismes et lui avons associé des aspects décisionnels, raisonnement, représentation des connaissances… » Il crée ainsi le groupe robotique et intelligence artificielle au LAAS. Les thématiques liées au mécanisme et au mouvement des robots, telles que les actions par bras robotisé, les perceptions par ordinateur et capteurs se poursuivent… Pressentant l’intérêt croissant d’une ouverture vers l’intelligence artificielle, Georges Giralt développe également cet axe de recherche. « Les thèmes liés au mécanisme et au mouvement sont dans le réel d’aujourd’hui. Mais dans le futur peut-être qu’il y a la place aussi pour les aspects intelligence artificielle », devine-t-il à l’époque.
Les premiers robots intelligents : Hilare et la « manip des cubes »
L’intelligence artificielle s’entend alors comme la capacité d’un robot à appréhender son environnement, grâce à ses capteurs notamment, à le comprendre et à réaliser correctement son action. À partir d’un ordre synthétique, il doit élaborer et effectuer tout le processus qui le mène à son but. En somme, il raisonne sur son environnement et sur lui-même pour réaliser une tâche.
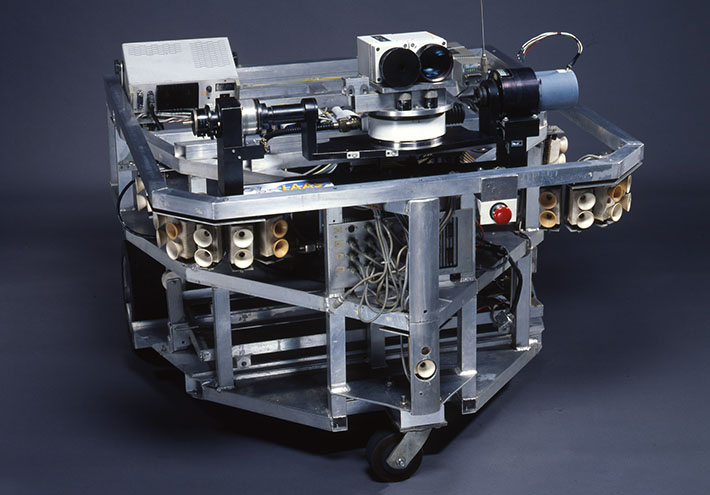
En 1977 débute un projet de robot mobile autonome baptisé Hilare qui confèrera une renommée internationale à l’équipe de Georges Giralt. Roland Prajoux se souvient : « Nous n’étions pas les premiers dans le monde mais pas loin quand même ! Il y en avait eu un ou deux dans des universités américaines. » La difficulté ne réside pas dans la mobilité d’Hilare, qui est une technique acquise, mais dans son autonomie de raisonnement et de comportement. « L’autonomie c’est de ne pas mâcher les mots au système », résume Roland Prajoux. Hilare bougera et planifiera ses mouvements en évitant les obstacles qui n’étaient pas nécessairement dans l’information initiale dont il disposait.
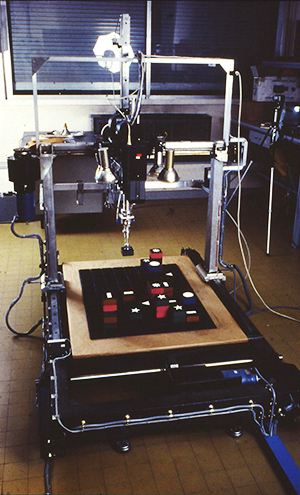

Autre expérimentation phare de l’époque : la « manip des cubes ». Son nom se réfère à une célèbre expérience en intelligence artificielle, appelée le « blocks world » où le but d’un système informatique est de trouver la plus petite suite d’actions à réaliser pour modifier la configuration d’un ensemble de blocs - virtuels -.
Georges Giralt et son équipe développent un système de bras robotisé qui manipule et déplace des blocs -réels -. « On avait apporté deux choses : l’expérimentation réelle, Dieu sait si c’est plus compliqué que de faire de petits dessins sur un papier, et la partie intelligence artificielle qui était originale. Le système « intelligent » qui concevait les séquences de déplacements n’était pas fait sur les mêmes bases que les systèmes classiques », précise Roland Prajoux.
L’ensemble du groupe de robotique et intelligence artificielle du laboratoire s’associe pour mener à bien ce projet. « Ça nous permettait d’intégrer les travaux en vision que faisaient certains membres du groupe, la partie actionneur pour manipuler les cubes eux-mêmes et le tout connecté avec un logiciel d’intelligence artificielle qui disait : bon ben maintenant qu’est ce que je fais ? »
Ces recherches pionnières autour de l’autonomie des robots couplée à leur conception mécanique seront poursuivies avec le programme Automatisation et robotique avancée (ARA), mis en place et dirigé par Georges Giralt de 1980 à 1986. Rachid Alami, actuellement directeur de recherche au LAAS, revient sur ce programme : « C’était extrêmement intéressant et pionner parce qu’il touchait de nombreux aspects de la robotique, sans oublier justement l’intelligence artificielle. Il couvrait la conception mécanique du robot : quelle est sa forme, comment seraient ses articulations, ses capteurs… Puis les algorithmes de commandes et de perceptions. Et la décision : le raisonnement sur la capacité du robot, la planification et l’exécution de la tâche. À l’époque c’était plutôt un robot à poste fixe, un bras manipulateur qui réalisait des tâches mais déjà on se posait un défi de « programmation automatique », c'est-à-dire que plutôt que de programmer à l’avance et dans le détail les moindres faits et gestes du robot, on rêvait de pouvoir le programmer à très haut niveau en décrivant de manière grossière la tâche, à lui de l’affiner automatiquement et de la réaliser. »
Les applications de ces recherches pluridisciplinaires sont nombreuses pour Georges Giralt. Les robots pourraient servir à terme dans les domaines de la protection civile, l’intervention lors de feux de forêt et en sites hostiles, l’agriculture, l’océanologie, l’exploration spatiale…
« Au LAAS, nous avons toujours défendu un double défi : nous voulons faire de la robotique qui soit utile socialement, économiquement et nous voulons faire aussi une robotique qui soit une science. »
Un grand pas pour l’homme et un grand pas pour le robot
1969, premiers pas de l’Homme sur la Lune. Fin des années 1980, l’équipe du LAAS se penche sur la perspective de l’exploration planétaire pour ses robots intelligents. Le programme Robots d’intervention sur site planétaire(RISP) est lancé. « C’était très tentant pour un roboticien d’avoir un robot autonome. C’était encore plus tentant de penser : et quid si nous devions faire bouger ce robot à l’extérieur dans un terrain très difficile et si en plus c’était vraiment quelque chose d’impossible à télé-opérer ? », se remémore Georges Giralt. « J’ai eu la chance qu’on me propose de conduire un programme pour essayer de développer justement un robot qui serait capable d’être utilisé sur des sites aussi difficiles que des sites planétaires, comme Mars qui était le summum du rêve pour les physiciens de l’espace. » Le développement de tels robots permettrait d’explorer la planète Mars sur des dizaines de kilomètres et de collecter des échantillons.
« Quand nous avons démarré, je me suis interdit de dire que l’on allait fabriquer l’objet qui allait être posé sur Mars. Ça n’était pas le rôle des chercheurs. Tout ce que nous faisons ici ce sont des choses qui sont pleines de bugs. »
précise Georges Giralt.
Raja Chatila, directeur du LAAS de 2007 à 2010, souligne tout de même l’application directe des recherches conduites par Georges Giralt. « On peut voir dans les robots planétaires qui se promènent sur Mars, Spirit et Opportunity, des techniques, des études et des résultats qui ont été menés ici. » Les robots jumeaux développés et envoyés sur Mars en 2004 par la Nasa, National aeronautics and space administration, sont donc les lointains cousins d’Hilare.
Vers un robot compagnon humanoïde?
Lors de la série d’entretiens de 2009, Georges Giralt, âgé de 79 ans, montre son intérêt toujours vif pour les questions actuelles de robotique et d’intelligence artificielle, notamment la problématique des robots d’assistance capables d’interagir dans un environnement humain.
« J’aimerais vraiment avoir dix ans de moins et m’intéresser à la robotique de maintenant, en particulier les robots assistants qui n’existent pas encore, qui paraissent être des humanoïdes mais qui sont des bouts de ferraille. Rien ne permet d’affirmer qu’il en sera toujours ainsi… L’univers du robot aujourd’hui, c’est uniquement une sémantique géométrie. Il n’y a pas de chaises, de tables… Mais des espaces vides et des espaces pleins. C’est tout ce que nous avons su faire. Et on a mis beaucoup d’années. Ça rend modeste. Il faut maintenant absolument faire un robot qui a certaines capacités cognitives, qui a accès au - concept - de chaise. C’est là le grand défi scientifique. Je crois qu’il existera des robots de type assistants. Par contre, rien n’oblige à ce que ça ait une forme humanoïde. »
Au-delà des questionnements techniques soulevés par la volonté de développer ce type de robot, le chercheur entrevoyait également les dimensions philosophiques.
« Si vous aviez un robot qui vous accompagne comme alter ego. Est-ce que vous vous rendez compte à quel point vous êtes prêt à vous poser la question ultra fondamentale : qu’est-ce qui me différencie ? »
Un héritage d’actualité
L’équipe du LAAS ouvre bien ses travaux vers un robot qui accompagne, aide, assiste l’homme et lui amène même une présence. La famille des robots s’est agrandi et compte plusieurs robots humanoïdes, robots d’intérieur, robots rover d’extérieur, bras robotiques et anthropomorphes…
L’héritage de Georges Giralt est vibrant dans la communauté scientifique toulousaine. En 2019, l’Université a lancé un institut interdisciplinaire d’intelligence artificielle, ANITI (Artificial and natural intelligence Toulouse Institute). Son objectif est de faire dialoguer chercheurs et industriels pour développer l’intelligence artificielle de demain.

BIO EXPRESS Georges Giralt (1930- 2013)
- 1952 : Technicien, École nationale supérieure d'électrotechnique et d'hydraulique, Toulouse
- 1952 : Débute ses études d’ingénieur ès-Sciences, École nationale supérieure d'électrotechnique et d'hydraulique à Toulouse
- 1956 : Intègre le CNRS et s’implique dans le développement du laboratoire de génie électrique, ancêtre du LAAS, Toulouse
- 1958 : Doctorat ès sciences en électronique, Faculté des sciences, Université de Toulouse
- 1968 à 1974 : Co-directeur du LAAS, au côté du professeur Jean Lagasse
- 1972 : Médaille d’argent du CNRS
- 1973 : Séjour d’un an à l’Université de Californie, Berkeley
- 1976 : Création du groupe Robotique et intelligence artificielle, LAAS-CNRS
- 1977 : Lancement du projet Hilare, un des premiers robots mobiles autonome
- 1980 : Mise en place du programme Automatisation et robotique avancée (ARA)
- 1982 : Représentant français et secrétaire de l’International advancedrobotics program institué par le G7
- 1989 : Création du programme Robots d’intervention sur site planétaire (RISP)
- 1997 : Prix Joseph Engelberger